| ▲ 김현미 국토교통부장관이 20일 중부내륙고속도로 여주시험도로에서 자율협력주행 기술을 시연하고 있다.(사진:국토교통부) |
이날 시연에 나선 자율협력주행은 기존의 자율주행에서 더 진보된 기술이다. 기존 자율주행은 자동차에 장착된 카메라, 레이더 등 감지기를 통해 주변상황을 인식한다. 자동차에서 멀리 떨어진 지역이나 사각지대에서 발생하는 상황은 인지할 수 없는 한계가 있다.
만일 자동차에 장착된 감지기가 주변상황을 제대로 인식할 수 없는 경우, 완벽한 수준의 주행을 구현하기 어려웠다.
반면 자율협력주행은 이러한 감지기의 한계를 극복해 도로 인프라(V2I) 또는 다른 자동차(V2V)에서 정보를 받아 운전자의 개입없이 스스로 방향을 전환해 차선을 바꾸거나 감속하는 것이 가능하다.
이날 행사에서는 자율주행차가 최대 시속 80km의 속도로 주행하다 감지기가 인식하기 어려운 7가지 상황을 가정해 대응하는 모습을 시연했다.
전방에 작업구간이 있거나, 후미등이 보이지 않는 전전방의 자동차가 급정거하는 경우, 전방에 고장 자동차가 나타나는 경우에는 자동으로 차로를 변경했다. 또 사각지대에서 다른 자동차가 갑자기 끼어드는 경우나 앞쪽 도로가 얼어있는 경우, 주행차로가 줄어드는 경우 등은 스스로 감속이 이뤄졌다.
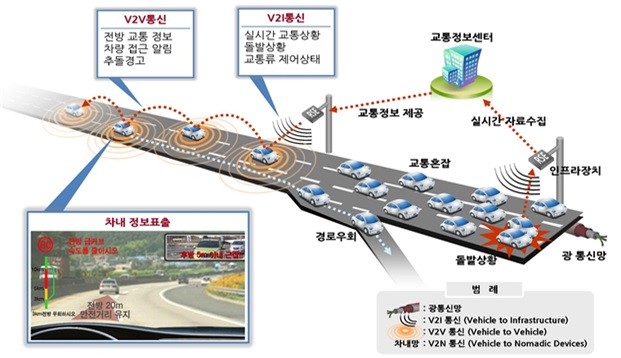
| ▲ 자율차-도로 연계기술 시연 안내(자료:국토교통부) |
자율협력주행은 국토부가 추진중인 '스마트 자율협력주행 도로시스템 개발 연구'의 중간 결과물이다. 연구가 완료되는 오는 2020년에는 일반도로에서 자율협력주행이 가능토록 할 계획이다. 연구는 지난 2015년 7월부터 오는 2020년 7월까지 진행된다. 연구비는 275억원이다.
국토부는 자율협력주행 기술을 통해 교통흐름을 최적화, 교통사고와 교통체증이 없는 도로가 가능할 것으로 기대하고 있다. 향후에 누구나 필요할 때 자동차를 호출해 사용할 수 있는 '수요자 맞춤형 교통시스템'도 도입될 전망이다.
김현미 국토부 장관은 "4차 산업혁명의 핵심은 산업·기술 간의 융·복합이며, 자율협력주행 기술은 대표적인 사례"라면서 "자동차에 장착된 감지기의 한계를 인프라가 보완함으로써 자율주행의 효율성과 안전성을 크게 향상시킬 것으로 기대한다"고 밝혔다.