"기술 혁신을 통해 지금 우리가 누리는 당연한 현재가 불편한 과거가 되길 바란다"
네이버랩스 석상옥 대표는 25일 서울 용산구 서울드래곤시티에서 열린 기자간담회에서 자사 기술력을 통해 더 편리한 세상을 만들어보겠다면서 이 같이 밝힌 뒤 "네이버랩스의 2라운드 미션은 네이버를 생활 공간으로 연결하는 것"이라고 강조했다.
네이버랩스는 기술로 서비스 공간을 재창조하고 공간, 서비스, 사용자를 연결해 궁극적으로 모든 공간을 네이버와 연관시킬 수 있도록 하겠다는 설명이다.
네이버랩스는 네이버의 선행 기술 연구 조직으로 지난 2013년 네이버 사내 기술연구 조직으로 출발, 2017년 1월 별도 법인으로 분사했다. 석 대표는 이날 취임 후 첫 간담회에 나선 것으로, 향후 3년간 집중적으로 도전할 기술 미션과 로드맵을 밝혔다.
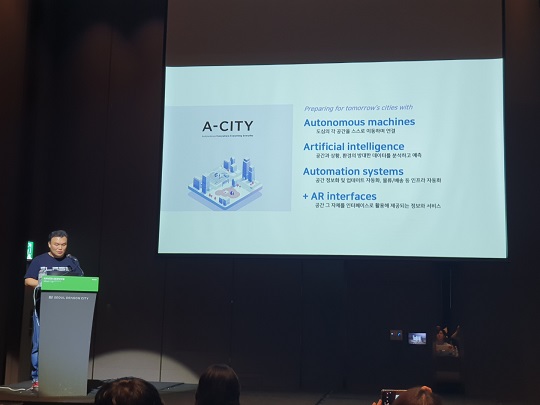
네이버랩스가 내세운 미래의 청사진은 'A-CITY(에이시티)'다. 에이시티는 다양한 형태의 머신들이 도심 각 공간을 스스로 이동하며 새로운 방식의 연결을 만들고, AI와 로봇이 공간의 데이터를 수집·분석·예측해 다양한 인프라들이 자동화된 도심 환경을 뜻한다.
네이버랩스는 에이시티 구현을 위해 등 로보틱스, 자율주행, 매핑, 측위 등 다양한 기술을 연구하고 있다. 특히 석 대표는 에이시티를 위한 핵심 기술로 자율주행, 클라우드 로보틱스를 꼽았다.
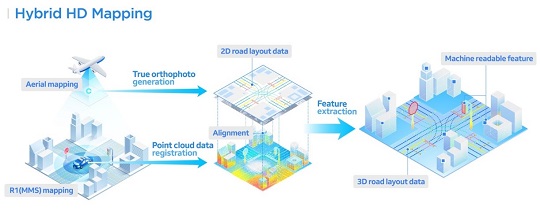
◇ ‘하이브리드 HD매핑 솔루션’…서울 레이아웃 지도구축
네이버랩스는 에이시티 구현을 위해 도심 속 실내, 도로, 인도 등 모든 공간을 고정밀 지도 데이터로 통합하고 장소·환경·목적에 따라 다양한 변용이 가능한 지능형 자율주행머신을 구축한다는 구상이다.
이날 자율주행 분야 발표에 나선 백종윤 자율주행그룹 리더는 자율주행기술을 매핑·측위·인지·예측·계획 등 다양한 분야의 기술들이 모두 해결되어야 하는 ‘종합예술’로 묘사했다. 위치 인식과 컨트롤까지 다양한 기술들이 복합적으로 작용해야 하기 때문이다.
특히 GPS 신호 음영 지역이 많은 도심 속 자율주행을 위해서는 자율주행머신의 두뇌이자 센서인 HD맵의 신속한 제작과 업데이트가 무엇보다 중요하다고 강조했다.
백종윤 리더는 "자율주행 시 GPS 의존도가 높으면 위치가 흔들리는 경우가 많아, 실제 자율주행에 도입되면 사고 위험이 크다"면서 "HD맵은 안정적인 자율주행이 가능하다"고 말했다.
이에 네이버랩스는 딥러닝과 비전 기술로 도로 정보를 자동 추출해 보다 신속하게 지도를 제작할 수 있는 자동화 알고리즘과 시시각각 변하는 도로정보까지 신속하게 반영할 수 있는 크라우드 소스 매핑(crowd-source mapping) 방식의 HD맵 업데이트 솔루션 ‘ACROSS’ 연구에 집중하고 있다.
이를 바탕으로 네이버랩스는 올해 안으로 고도화된 ‘하이브리드 HD 매핑’ 솔루션을 활용, 서울 시내 왕복 4차선 이상의 주요 도로 2000km의 레이아웃 지도를 완성할 계획이다. 현재 마곡, 상암, 여의도, 강남 등 자율주행차가 많이 활용되는 곳을 위주로 테스트하고 있으며 오는 8월 안으로 완료될 예정이다.
◇ 사진 한 장으로 실내위치까지 파악
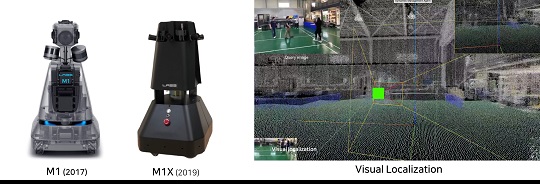
석상옥 대표는 더욱 진화한 실내 지도 제작 기술과 이를 활용한 측위 기술, 실내와 도로를 잇는 인도 영역에 대한 매핑 로드맵 설명에 나섰다. 이날 그는 3차원 실내 지도 제작 로봇 M1X를 활용해 인천국제공항과 코엑스몰을 스캔한 대규모 실내 3차원 지도를 공개했다.
석 대표는 "인천국제공항의 경우 3시간가량 스캔한 데이터가 200GB(기가바이트)에 이르고 20만장의 사진을 촬영해 12시간의 프로세싱을 거쳐 정밀 지도를 완성했다"고 설명했다.
아울러 이러한 실내 지도를 기반으로 한 비주얼 로컬라이제이션(Visual Localization) 기술도 선보였다. 해당 기술을 활용하면 GPS가 통하지 않는 실내에서도 단 한 장의 사진만 있으면 자신의 정확한 위치를 입체적으로 파악할 수 있다.
석 대표는 "택시를 호출할 때나 길을 찾을 때 정확한 내 위치가 뜨지 않는 것은 (사용자들이 크게 자각 못할지 모르지만) 어떻게 보면 불편한 상황"이라며 "내 위치를 정확히 알면 할 수 있는 것이 굉장히 많다"고 언급했다.
그러면서 "3차원 지도 제작에 필요한 고정밀 실내 측위 기술과 이를 활용한 AR 내비게이션, 로봇 자율주행과 같이 고차원적인 세부 기술을 동시에 확보한 사례는 세계적으로 극히 드물다"며 "대형쇼핑몰, 공항 등의 대규모 공간에서 보다 유용하게 활용될 수 있을 것"이라고 덧붙였다.
석 대표는 올해부터 이러한 매핑·로컬라이제이션 기술을 실내보다 환경적 변수가 다양한 인도 영역까지 확대할 방침이다. 그는 “단기적으로는 사람, 장기적으로는 4종 보행 로봇이 직접 매핑 및 로컬라이제이션을 위한 데이터를 취득할 수 있도록 Comet 프로젝트를 가동 중”이라고 말했다. 이를 위해 네이버랩스의 펀딩으로 MIT에서 개발한 4족 보행 로봇인 치타3와 미니치타가 활용될 전망이다.
마지막으로 석 대표는 올해 중요한 미션 중 하나로 5G브레인리스 로봇 제어 기술 통합을 꼽았다. 5G브레인리스 로봇 제어 기술은 5G의 초저지연 특성을 활용해 로봇의 외부로 두뇌를 떼어내는 방식이다. 클라우드를 로봇의 두뇌 역할을 하기 때문에 여러 로봇을 동시 제어하고 로봇의 물리적 크기와 무관한 고성능, 고정밀 제어가 가능하다.
석 대표는 "연내 네이버 데이터센터 ‘각’이 자율주행 로봇들의 두뇌가 되어 성능과 활용성을 극대화하는 것을 목표로 NBP·퀄컴·인텔·KT와 다각도로 협력하고 있다"고 말했다.